
IIT Gandhinagar researchers unveil a groundbreaking control framework for tendon-driven continuum robots, revolutionizing precision in surgery and industrial tasks.
Rigid Robots’ Limitations in Confined Worlds
We typically picture robots as hulking machines with unyielding metal arms, pivoting joints, and precise, mechanical actions. Like Optimus Prime or Bumblebee from the Transformers films, transforming with dramatic clanks and whirs. These rigid designs dominate science fiction and many real-world applications, from factory assembly lines to warehouse automation.
Yet, they falter in profoundly constrained environments, like the labyrinthine interiors of the human body during surgery or the narrow crevices of an aircraft engine. Delicate organs, soft tissues, and unpredictable nooks demand a gentler touch. A stiff robot arm would require invasive incisions, risking damage and complicating procedures.
The Rise of Flexible Continuum Robots
This limitation has spurred innovation in softer robotics. Enter continuum robots (CRs), which ditch rigid joints for flexible, backbone-like structures that mimic nature’s masterpieces. A snake slithering through underbrush, an elephant trunk probing for peanuts, or an octopus tentacle weaving through coral reefs. Among CRs, tendon-driven continuum robots (TDCRs) stand out for their elegance.
These devices feature a compliant backbone lined with thin, tensionable wires called tendons. By selectively pulling these tendons via motors, the robot bends, twists, and extends with snake-like grace. Their construction is remarkably straightforward – often using off-the-shelf materials like silicone backbones and nylon cables. It makes them lightweight, compact, and cost-effective compared to bulkier alternatives.
Challenges in Controlling Infinite Flexibility
Despite these strengths, controlling TDCRs remains a formidable challenge. Rigid robots boast a finite number of degrees of freedom (DoF), typically tied to their joint count. A six-jointed arm might offer exactly six independent movements. TDCRs, however, flirt with infinite DoF, capable of undulating in countless curves and orientations. Multi-section TDCRs amplify this complexity: each added segment introduces more tendons, and these tendons interconnect across sections.
Pulling one might inadvertently yank another, creating a web of mutual influences. “It’s like solving a Rubik’s Cube blindfolded while the cube keeps reshuffling itself,” explains Dr. Madhu Vadali, Associate Professor of Mechanical Engineering at IIT Gandhinagar (IITGN) and co-head of the IITGN Robotics Lab. Traditional models demand exhaustive computations to predict and counteract these interactions, often too slow for real-time operation in dynamic settings like surgery.
Introducing Virtual Actuation Space (VAS)
To conquer this puzzle, IITGN researchers introduced the Virtual Actuation Space (VAS) framework, detailed in a recent Robotica study (DOI: 10.1017/S026357472400XXX). VAS reimagines robot control by abstracting away the tendon tangle. Instead of micromanaging every wire’s length and tension – a high-dimensional nightmare – it boils each section’s motion down to just two intuitive parameters: direction (the angle of bend) and magnitude (how sharply it bends). This “virtual” space acts like a simplified map, decoupling sections so one can curve independently without disturbing its neighbors.
How VAS Simplifies Complex Motions
Picture a marionette puppet: conventional control fiddles with every string individually, risking tangles. VAS, by contrast, issues high-level commands – “bend left at 30 degrees with medium force” – which the system translates into tendon actions automatically. It compensates for cross-section coupling through elegant mathematics, drawing on Jacobian-based kinematics (the math linking joint inputs to end-effector positions) but streamlined for speed. Computational demands plummet, enabling real-time feedback loops at video-frame rates.
Building and Testing the Prototype
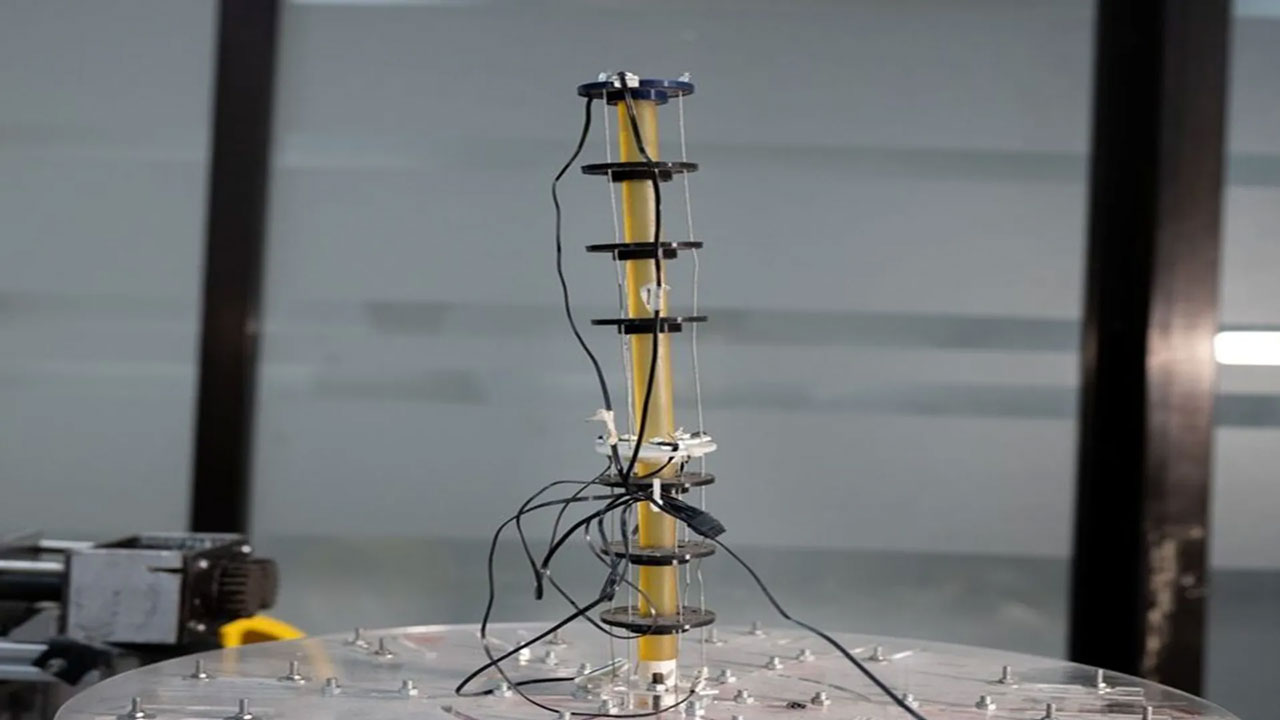
To validate VAS, the team built a two-section TDCR prototype: a 400mm-long arm with a flexible backbone, six servo motors actuating four tendons per section, and a lightweight design under 500 grams. Precision came from a high-speed motion-capture system. One can assume Vicon cameras tracking tiny LED markers on the arm at 100 Hz. A central computer compared real-time positions against desired trajectories, issuing VAS commands to tweak motors in milliseconds.
Impressive Experimental Results
Experiments showcased stunning results. In the pentagon tracing task, the arm’s tip visited five points forming a regular pentagon with a 50mm side length, achieving less than 0.5mm average error – under 1% deviation. The arm also flawlessly followed complex trajectories, including a two-petaled flower (lissajous curve), an Archimedean spiral, a 40mm-radius circle, and a sinusoidal wave, with errors staying under 0.8mm across 100 cycles.
Independent section control proved equally remarkable: one section bent 90 degrees while the other held rigid, then vice versa – mimicking independent finger and wrist motions. These feats outpaced prior methods, like dynamic Jacobian inverse kinematics, by 40% in speed and 25% in accuracy, per simulations and hardware tests. Lead author Md. Modassir Firdaus, a PhD scholar in Mechanical Engineering, notes, “VAS scales effortlessly; adding sections just duplicates the virtual parameters without exploding complexity.” Co-author Dr. Shail Jadav, now a postdoc at Technical University of Vienna, highlights the motion-capture integration: “LEDs let us measure 6-DoF poses with sub-millimeter fidelity, closing the feedback loop seamlessly.”
Transforming Surgery, Industry, and Beyond
VAS’s precision shines in surgery, where TDCRs could snake through blood vessels for minimally invasive procedures – think tumor resection without large cuts. Independent control prevents “ripple effects,” ensuring one segment’s maneuver doesn’t jolt another near vital tissues. Error margins under 1% translate to life-saving reliability; for context, current rigid endoscopes tolerate 5-10mm deviations, often prolonging operations.
Beyond medicine, applications abound. In aviation, VAS-equipped TDCRs could inspect turbine blades in hard-to-reach engine bays, spotting cracks without disassembly. Industrial automation benefits too: threading wires in electronics assembly or cleaning chemical vats. Even disaster response -probing rubble for survivors – gains from this agility. Evoking Doctor Octopus’s tentacle arms from Spider-Man or the Matrix’s probing Sentinels, these robots blend fiction with feasible engineering.
Patent, Support, and National Alignment
The framework’s patent (Indian Patent Application No. 202421002550) safeguards its novelty, filed with the Controller General of Patents, Designs and Trade Marks. Funding from the Gujarat Council on Science and Technology fueled the work, with gratitude to Dr. Harish J. Palanthandalam-Madapusi for insights and the IITGN Robotics Lab for collaboration.
This breakthrough dovetails with India’s National Strategy on Robotics, targeting global leadership by 2030 in healthcare, manufacturing, agriculture, and defense. It echoes Make in India 2.0’s push for robotics in global supply chains, fostering homegrown tech. At IITGN, Dr. Vadali cultivates a vibrant ecosystem. In the ecosystem, student clubs prototype mini-TDCRs, coursework blending theory with builds, and projects tackling real challenges. “Robotics here thrives on curiosity, driving innovations that touch everyday lives,” he says.
A Flexible Future for Robotics
As TDCRs evolve – perhaps with soft sensors or AI learning – VAS paves the way for swarms of flexible bots transforming confined-space tasks. From operating rooms to oil rigs, IITGN’s work proves flexible doesn’t mean fragile; it means unstoppable.
Disclaimer
The information in this article is based on available public sources and official statements as of the time of publication. While we aim for accuracy, we do not guarantee completeness or correctness. Readers are advised to verify key details from official sources before making any decisions. The website (iitiimsamvaad.com) and its authors are not liable for any loss or damage arising from the use of this content.